How to Draw Phase Plane
Show Mobile Find Bear witness All NotesHide All Notes
Mobile Observe
You announced to be on a device with a "narrow" screen width (i.e. you are probably on a mobile phone). Due to the nature of the mathematics on this site it is all-time views in landscape mode. If your device is not in landscape way many of the equations will run off the side of your device (should be able to roll to run into them) and some of the card items will be cutting off due to the narrow screen width.
Section five-six : Phase Airplane
Earlier proceeding with actually solving systems of differential equations there'south 1 topic that we need to have a look at. This is a topic that'southward not always taught in a differential equations course but in example you lot're in a course where it is taught nosotros should cover it so that you are prepared for information technology.
Let's offset with a general homogeneous system,
\[\begin{equation}\vec x' = A\vec 10\label{eq:eq1}\end{equation}\]
Notice that
\[\vec x = \vec 0\]
is a solution to the arrangement of differential equations. What we'd like to enquire is, do the other solutions to the system approach this solution equally \(t\) increases or do they move away from this solution? We did something like to this when we classified equilibrium solutions in a previous section. In fact, what nosotros're doing hither is simply an extension of this thought to systems of differential equations.
The solution \(\vec x = \vec 0\) is chosen an equilibrium solution for the system. Equally with the single differential equations case, equilibrium solutions are those solutions for which
\[A\vec ten = \vec 0\]
We are going to assume that \(A\) is a nonsingular matrix and hence will have only 1 solution,
\[\vec x = \vec 0\]
and and so we will have merely one equilibrium solution.
Back in the unmarried differential equation instance recall that nosotros started by choosing values of \(y\) and plugging these into the function \(f(y)\) to determine values of \(y'\). Nosotros and then used these values to sketch tangents to the solution at that particular value of \(y\). From this we could sketch in some solutions and use this information to classify the equilibrium solutions.
We are going to practise something like here, but information technology will be slightly different equally well. First, we are going to restrict ourselves down to the \(2 \times two\) case. And then, we'll be looking at systems of the form,
\[\begin{array}{*{20}{c}}\begin{align*}{{10'}_1} & = a{x_1} + b{x_2}\\ {{ten'}_2} & = c{x_1} + d{x_2}\end{align*}&{\hspace{0.25in} \Rightarrow \hspace{0.25in}\hspace{0.25in}\vec x' = \left( {\begin{array}{*{twenty}{c}}a&b\\c&d\end{array}} \correct)\vec ten}\end{assortment}\]
Solutions to this system will be of the course,
\[\vec x = \left( {\begin{array}{*{xx}{c}}{{x_1}\left( t \correct)}\\{{x_2}\left( t \right)}\end{array}} \right)\]
and our single equilibrium solution will be,
\[\vec 10 = \left( {\begin{array}{*{20}{c}}0\\0\end{assortment}} \correct)\]
In the unmarried differential equation example we were able to sketch the solution, \(y(t)\) in the y-t plane and see actual solutions. Even so, this would somewhat difficult in this case since our solutions are actually vectors. What we're going to exercise here is remember of the solutions to the system as points in the \({x_1}\,{x_2}\) airplane and plot these points. Our equilibrium solution volition stand for to the origin of \({x_1}\,{x_2}\). airplane and the \({x_1}\,{x_2}\) plane is called the phase plane.
To sketch a solution in the phase plane we can option values of \(t\) and plug these into the solution. This gives us a bespeak in the \({x_1}\,{x_2}\) or phase plane that we tin plot. Doing this for many values of \(t\) will then give us a sketch of what the solution volition be doing in the phase plane. A sketch of a particular solution in the phase plane is called the trajectory of the solution. Once nosotros have the trajectory of a solution sketched nosotros tin can and so ask whether or not the solution volition arroyo the equilibrium solution as \(t\) increases.
We would like to be able to sketch trajectories without actually having solutions in paw. There are a couple of ways to do this. We'll look at i of those here and we'll look at the other in the adjacent couple of sections.
One fashion to get a sketch of trajectories is to do something similar to what nosotros did the first time nosotros looked at equilibrium solutions. We can cull values of \(\vec x\) (notation that these volition be points in the phase plane) and compute \(A\vec x\). This volition give a vector that represents \(\vec x'\)at that particular solution. As with the unmarried differential equation case this vector will be tangent to the trajectory at that indicate. Nosotros can sketch a bunch of the tangent vectors and then sketch in the trajectories.
This is a fairly work intensive fashion of doing these and isn't the way to do them in general. However, it is a way to become trajectories without doing any solution piece of work. All nosotros need is the system of differential equations. Allow's take a quick look at an example.
Example 1 Sketch some trajectories for the system, \[\begin{assortment}{*{twenty}{c}}\brainstorm{align*}{{x'}_1} & = {x_1} + ii{x_2}\\ {{x'}_2} & = 3{x_1} + 2{x_2}\finish{marshal*}&{\hspace{0.25in} \Rightarrow \hspace{0.25in}\vec x' = \left( {\begin{array}{*{xx}{c}}1&2\\three&two\end{array}} \right)\vec x}\finish{array}\]
Show Solution
So, what nosotros need to exercise is pick some points in the phase plane, plug them into the right side of the organization. We'll do this for a couple of points.
\[\begin{align*}\vec x & = \left( {\begin{array}{*{twenty}{c}}{ - 1}\\1\end{array}} \right) & \Rightarrow \hspace{0.25in}\vec ten'& = \left( {\begin{assortment}{*{20}{c}}one&2\\3&2\end{array}} \right)\left( {\begin{array}{*{xx}{c}}{ - 1}\\1\end{array}} \right) = \left( {\begin{assortment}{*{20}{c}}1\\{ - one}\cease{array}} \right)\\ \vec x & = \left( {\begin{assortment}{*{xx}{c}}2\\0\terminate{array}} \right) & \Rightarrow \hspace{0.25in}\vec x' & = \left( {\begin{array}{*{20}{c}}1&ii\\3&2\end{assortment}} \correct)\left( {\begin{assortment}{*{20}{c}}2\\0\finish{array}} \right) = \left( {\begin{array}{*{20}{c}}2\\6\end{assortment}} \right)\hspace{0.25in}\\ \vec 10 & = \left( {\begin{array}{*{xx}{c}}{ - iii}\\{ - 2}\end{array}} \right) & \Rightarrow \hspace{0.25in}\vec x' & = \left( {\begin{array}{*{20}{c}}1&2\\three&2\stop{array}} \correct)\left( {\begin{assortment}{*{xx}{c}}{ - three}\\{ - 2}\stop{array}} \right) = \left( {\brainstorm{array}{*{20}{c}}{ - 7}\\{ - 13}\end{array}} \right)\hspace{0.25in}\finish{align*}\]
So, what does this tell us? Well at the bespeak \(\left( { - i,1} \correct)\) in the phase plane at that place will be a vector pointing in the direction \(\left\langle {1, - ane} \right\rangle \). At the point \(\left( {two,0} \right)\) at that place will exist a vector pointing in the direction \(\left\langle {2,6} \right\rangle \). At the bespeak \(\left( { - 3, - 2} \correct)\) there volition be a vector pointing in the direction \(\left\langle { - 7, - thirteen} \right\rangle \).
Doing this for a big number of points in the phase plane will give the following sketch of vectors.
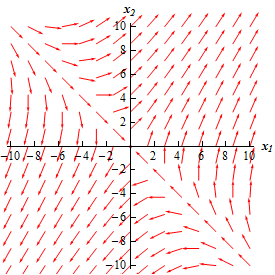
At present all we need to practise is sketch in some trajectories. To do this all we need to do is recollect that the vectors in the sketch in a higher place are tangent to the trajectories. Besides, the direction of the vectors give the direction of the trajectory as \(t\) increases so nosotros can bear witness the fourth dimension dependence of the solution by adding in arrows to the trajectories.
Doing this gives the following sketch.
This sketch is called the phase portrait. Usually phase portraits just include the trajectories of the solutions and not whatsoever vectors. All of our phase portraits form this bespeak on will only include the trajectories.
In this case it looks like most of the solutions volition start away from the equilibrium solution so as \(t\) starts to increase they motility in towards the equilibrium solution and so eventually offset moving away from the equilibrium solution once again.
There seem to exist four solutions that accept slightly dissimilar behaviors. Information technology looks like two of the solutions will start at (or near at least) the equilibrium solution and so motion direct away from it while 2 other solutions commencement away from the equilibrium solution and and then move straight in towards the equilibrium solution.
In these kinds of cases we telephone call the equilibrium point a saddle point and we phone call the equilibrium point in this case unstable since all only two of the solutions are moving away from information technology as \(t\) increases.
Every bit nosotros noted before this is not generally the way that nosotros will sketch trajectories. All nosotros really demand to get the trajectories are the eigenvalues and eigenvectors of the matrix \(A\). We volition see how to do this over the next couple of sections as we solve the systems.
Here are a few more stage portraits so you can see some more possible examples. We'll really be generating several of these throughout the class of the next couple of sections.
Not all possible stage portraits have been shown here. These are hither to show you some of the possibilities. Make sure to notice that several kinds can be either asymptotically stable or unstable depending upon the direction of the arrows.
Find the departure between stable and asymptotically stable. In an asymptotically stable node or spiral all the trajectories will move in towards the equilibrium signal as t increases, whereas a eye (which is ever stable) trajectory will simply movement effectually the equilibrium betoken but never actually move in towards it.
Source: https://tutorial.math.lamar.edu/classes/de/phaseplane.aspx
0 Response to "How to Draw Phase Plane"
Postar um comentário